
A Modified Wei-Yao-Liu Conjugate Gradient Method for Unconstrained Optimization and Motion Control of Robotic Motion Manipulators
DOI:
https://doi.org/10.37934/araset.34.1.314327Keywords:
Optimization, Conjugate Gradient methods, inexact line searchAbstract
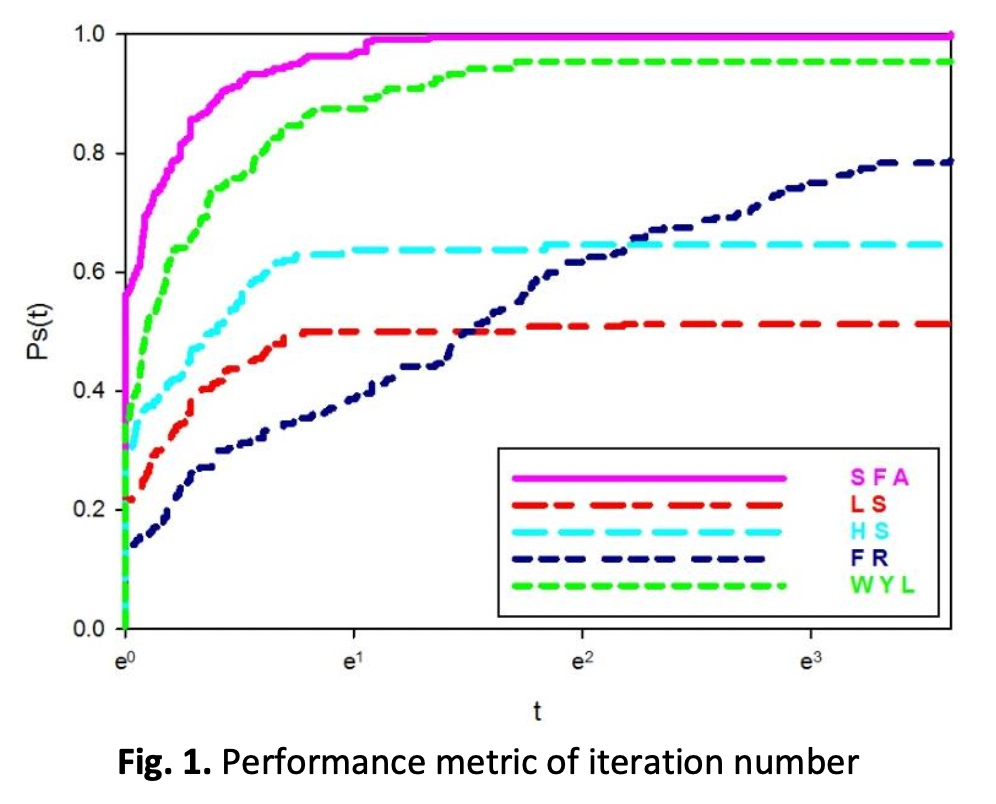
The WYL-type conjugate gradient (CG) iterative formulas have been widely studied by researchers because of their effective and robust algorithms as well as less memory requirements. However, recent modifications of the WYL formulas are very complicated for unconstrained optimization. Also, the performance of most of these methods are yet to be verified on real-life application problems. In this study, a new modification of Wei-Yao-Liu (WYL) CG formula was presented to compute the search direction of robotic motion control and unconstrained optimization problems (UOP). This study discussed the general convergence results of the new formula under suitable assumptions and showed that the scheme possesses the descent properties under inexact line search. Numerical results on some set of robotic motion control and UOP show that the new formula outperformed some existing formulas with the same characteristics. The new method was able to solved 100% of the test problems while WYL was able to solve about 90% and the other methods solved less than 50% of the test problems respectively.
Downloads
Downloads
Published
How to Cite
Issue
Section


























