
Selecting Dynamic Path Planning Algorithm Based-Upon Ranking Approach for Omni-Wheeled Mobile Robot
DOI:
https://doi.org/10.37934/araset.41.2.125138Keywords:
4OWMR, Hybrid A*, RRT, RRT*, PRM, WSM, Dynamic path planningAbstract
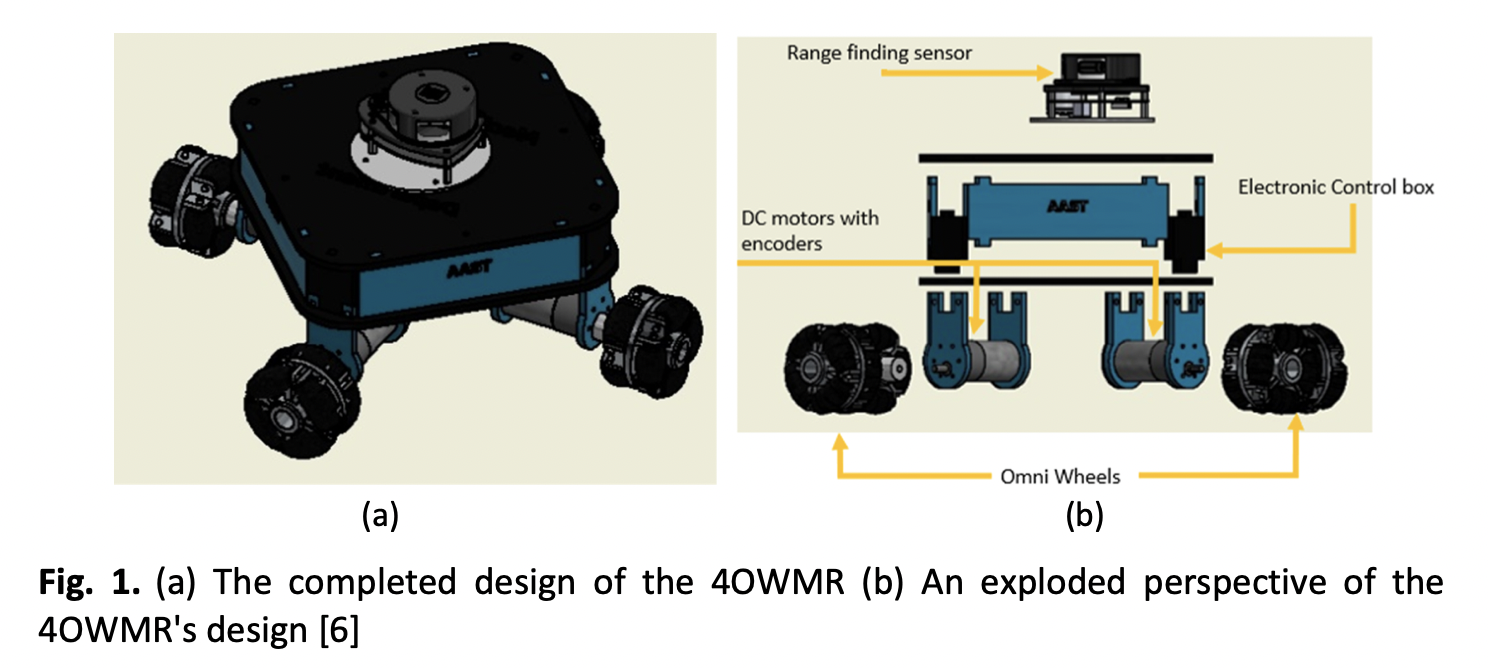
Four Omni Wheels Mobile Robot (4OWMR) are widely utilized for indoor navigation applications such as autonomous transportation, surveillance, rescue, and search. This paper proposes a ranking approach to select the dynamic path planning algorithm. The selection process involves implementing the four path planning techniques (PRM, RRT, RRT*, Hybrid A*) on three different maps. The Weighted Sum Model (WSM) is then applied to each map to rank these algorithms based on several factors. Finally, the points of each algorithm in the three maps are added up, and the algorithm with the highest score is selected as the dynamic path planning algorithm. The results indicate that the Hybrid A* algorithm surpasses the others, scoring 46 points, which represents a 21.7% increase compared to PRM and RRT, and a 30.4% increase compared to RRT* when using the weighted sum ranking technique. Therefore, it can be selected as the dynamic path planning algorithm.
Downloads
Downloads
Published
Issue
Section

























