
Environmental Impacts on the RSS-Based Visible Light Indoor Positioning System
DOI:
https://doi.org/10.37934/araset.55.1.6381Keywords:
Indoor positioning system (IPS), Visible light, Non-line-of-sight (NLOS), Received signal strength (RSS), TrilaterationAbstract
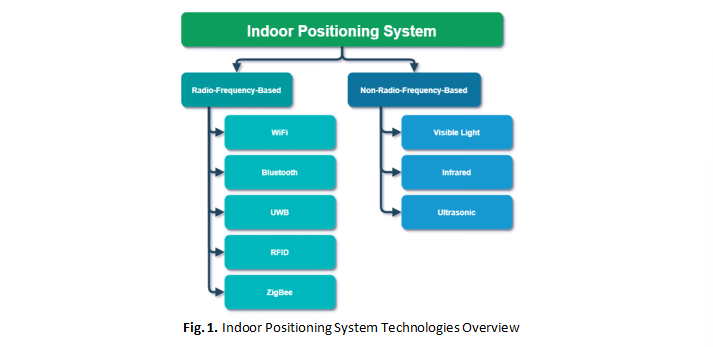
To address the shortcomings of the global positioning system (GPS) operating within indoor scenarios, a range of indoor positioning systems (IPS) have been proposed. Among these, visible light IPS garners substantial research interest for its potential as a cost-effective IPS solution. However, susceptibility to environmental influences like external light and non-line-of-sight that can significantly affect its performance hindered its adoption. Hence, a simulation framework capable of simulating these influences becomes crucial in supporting the effective deployment and promoting the adoption of visible light IPS. This paper investigates the feasibility of using a simulation framework to replicate environmental factors affecting the system, including external optical sources and blocked transmitters. The research involved the development of a received signal strength (RSS) based visible light IPS prototype and an associated simulation framework. Subsequently, the prototype was tested in three distinct environments: no influences, with an external optical source, and non-line-of-sight. The prototype achieved an accuracy of 0.0836 m, 0.3541 m, and 1.1519 m for 50% of the time respectively in these three environments. Ultimately, the simulation framework developed is capable of reproducing similar effects for all three environments with a difference in the accuracy of 76.08%, 74.86% and 867%, respectively. Thus, the findings support the use of the developed simulation framework for the effective development of visible light IPS in environments with no influences and with external optical sources.
Downloads
Downloads
Published
How to Cite
Issue
Section


























