
Evaluating the Performance of a Visual Support System for Driving Assistance using a Deep Learning Algorithm
DOI:
https://doi.org/10.37934/araset.34.1.3850Keywords:
Image Processing, Collision Avoidance, Deep Learning, Yolo V8, Object DetectionAbstract
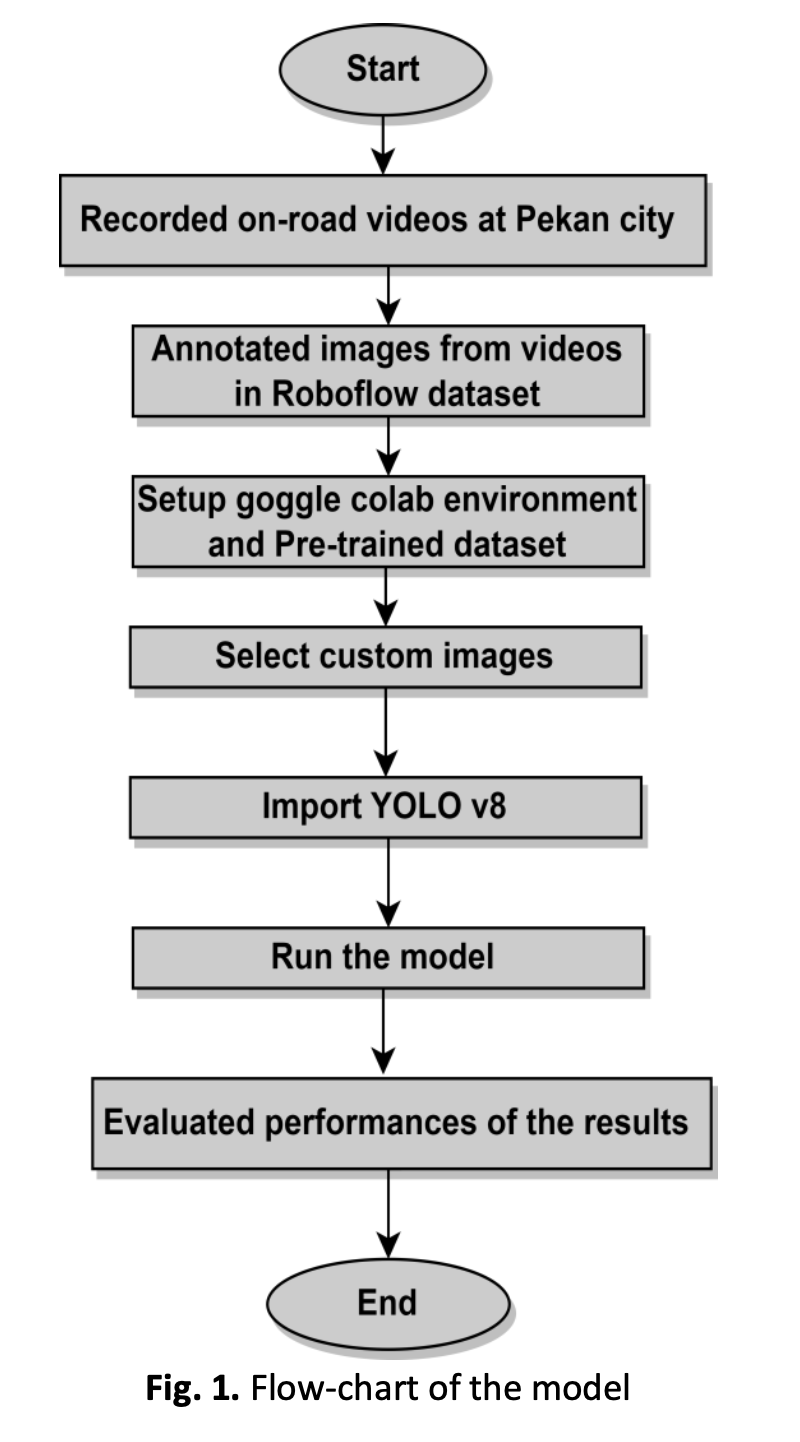
The issue of road accidents endangering human life has become a global concern due to the rise in traffic volumes. This article presents the evaluation of an object detection model for University of Malaysia Pahang (UMP) roadside conditions, focusing on the detection of vehicles, motorcycles, and traffic lamps. The dataset consists of the driving distance from Hospital Pekan to the University of Malaysia Pahang. Around one thousand images were selected in Roboflow for the train dataset. The model utilises the YOLO V8 deep learning algorithm in the Google Colab environment and is trained using a custom dataset managed by the Roboflow dataset manager. The dataset comprises a diverse set of training and validation images, capturing the unique characteristics of Malaysian roads. The train model's performance was assessed using the F1 score, precision, and recall, with results of 71%, 88.2%, and 84%, respectively. A comprehensive comparison with validation results has shown the efficacy of the proposed model in accurately detecting vehicles, motorcycles, and traffic lamps in real-world Malaysian road scenarios. This study contributes to the improvement of intelligent transportation systems and road safety in Malaysia.
Downloads
Downloads
Published
How to Cite
Issue
Section


























