
Comparison Method Q-Learning and SARSA for Simulation of Drone Controller using Reinforcement Learning
DOI:
https://doi.org/10.37934/araset.30.3.6978Keywords:
Reinforcement Learning (RL), Q-learning, SARSA(State-Action-Reward-State-Action), droneAbstract
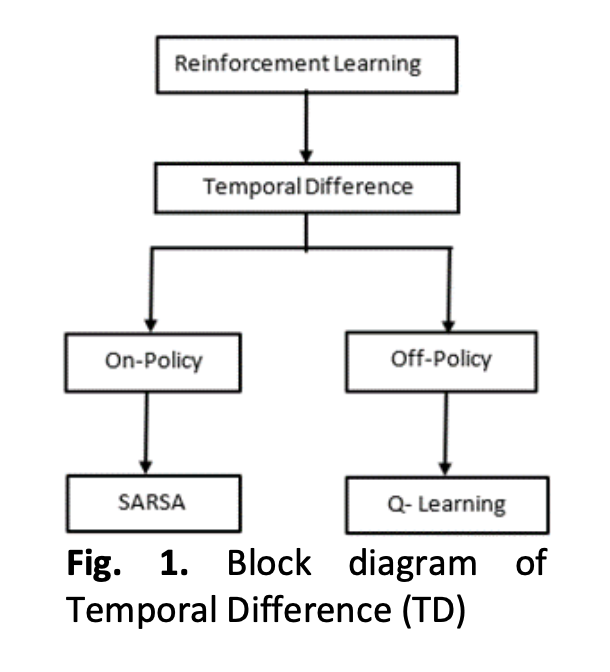
Nowadays, the advancement of drones is also factored in the development of a world surrounded by technologies. One of the aspects emphasized here is the difficulty of controlling the drone, and the system developed is still under full control by the users as well. Reinforcement Learning is used to enable the system to operate automatically, thus drone will learn the next movement based on the interaction between the agent and the environment. Through this study, Q-Learning and State-Action-Reward-State-Action (SARSA) are used in this study and the comparison of results involving both the performance and effectiveness of the system based on the simulation of both methods can be seen through the analysis. A comparison of both Q-learning and State-Action-Reward-State-Action (SARSA) based systems in autonomous drone application was performed for evaluation in this study. According to this simulation process is shows that Q-Learning is a better performance and effective to train the system to achieve desire compared with SARSA algorithm for drone controller.
Downloads
Downloads
Published
How to Cite
Issue
Section


























