CFD Analysis into the Resistance Characteristics of Remotely Operated Vehicles when Submerges Under Water and Sails on the Surface
DOI:
https://doi.org/10.37934/cfdl.15.8.166178Keywords:
CFD, ROV, Resistance, Pressure, Free Surface, 100 m Water DepthAbstract
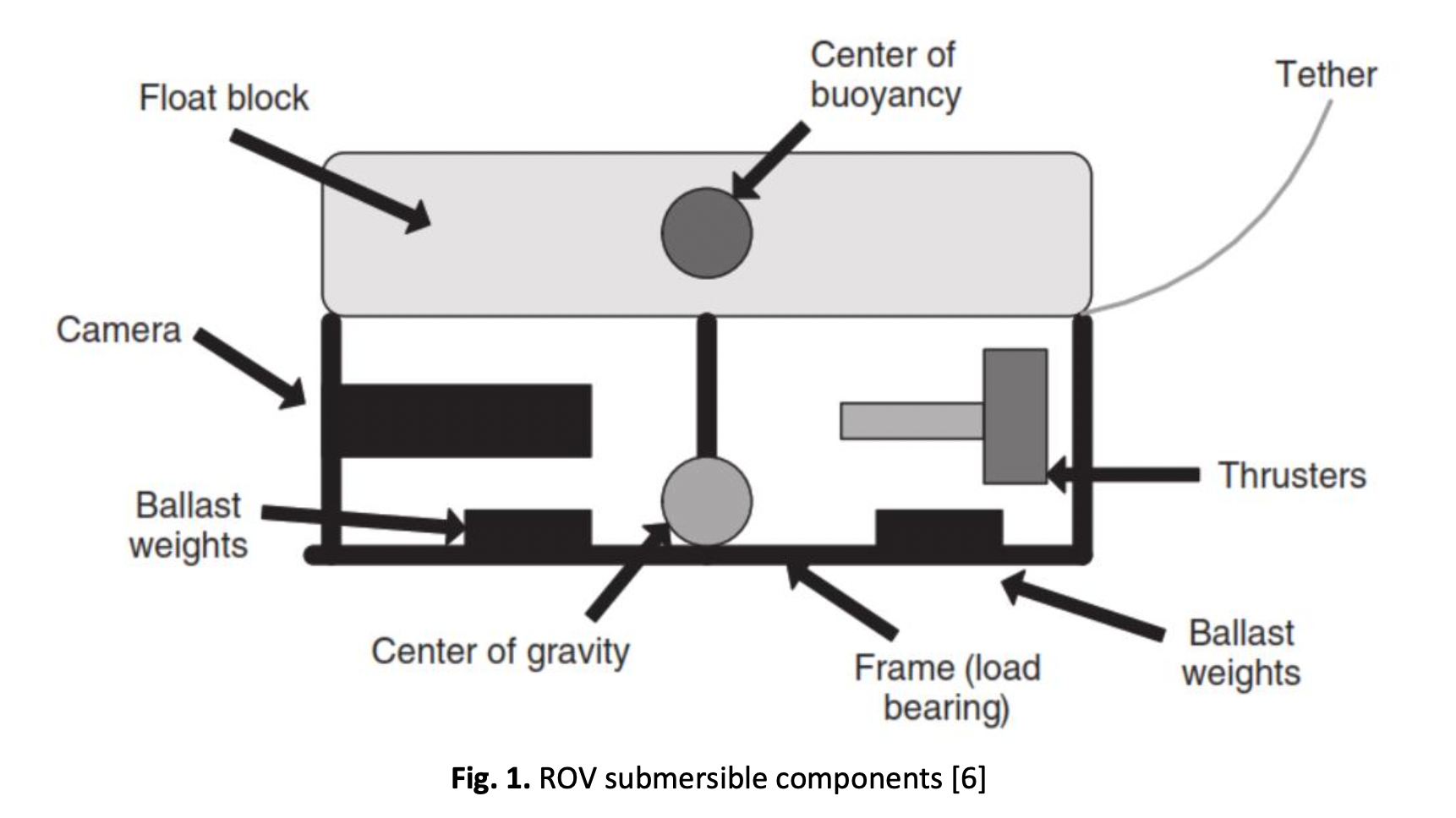
Remotely operated (underwater) vehicles, commonly known as ROVs, have a wide range of uses in the marine industry, including maintenance and repair. The research examines ROV pressure and resistance, is less likely at the present time. Furthermore, the design and operation of this remotely operated vehicle (ROV) rely heavily on accurate measurements of hydrodynamic loads. Computational Fluids Dynamic (CFD) technique makes it possible to obtain an accurate estimate of the forces that are being applied by the flow around the ROV hull. In this paper, an investigation of the resistance and pressure that the ROV experiences when on the surface and while submerged to a depth of 100 meters is presented. In addition, ROV was evaluated at several speeds, ranging from 0.5 to 1.5 metres per second. The speed of the ROV that is being evaluated will increase when significant impediments are introduced into the environment. This flips the direction of the pressure that is applied to the ROV hull. The CFD approach demonstrates the resistance that is generated on the ROV hull is, for the most part, affected by the speed at which it is moving. In free surface conditions, the average increase in resistance was 78.91%, and in submerged conditions, it was 74.24%. Nevertheless, the variation in test depth is where the main impact of the pressure value can be seen in the CFD simulation. Simulations conducted on the free surface indicate that the pressure on the ROV hull is about 1x10-3 kPa, whereas simulations conducted at a depth of 100 metres below the sea surface indicate that the pressure is approximately 972 kPa
Downloads
References
Xiang, Yan, JinBao Sheng, Lei Wang, YueBo Cai, Ying Meng, and Wei Cai. "Research progresses on equipment technologies used in safety inspection, repair, and reinforcement for deepwater dams." Science China Technological Sciences 65, no. 5 (2022): 1059-1071. https://doi.org/10.1007/s11431-021-1958-y
Zhao, Chenyu, Philipp R. Thies, and Lars Johanning. "Offshore inspection mission modelling for an ASV/ROV system." Ocean Engineering 259 (2022): 111899. https://doi.org/10.1016/j.oceaneng.2022.111899.
Bonnin-Pascual, Francisco, Alberto Ortiz, Emilio Garcia-Fidalgo, and Joan P. Company-Corcoles. "A reconfigurable framework to turn a MAV into an effective tool for vessel inspection." Robotics and Computer-Integrated Manufacturing 56 (2019): 191-211. https://doi.org/10.1016/j.rcim.2018.09.009
Kumar, Saurav, Alireza Mohammadi, David Quintero, Siavash Rezazadeh, Nicholas Gans, and Robert D. Gregg. "Extremum seeking control for model-free auto-tuning of powered prosthetic legs." IEEE Transactions on Control Systems Technology 28, no. 6 (2019): 2120-2135. https://doi.org/10.1109/TCST.2019.2928514
Yu, Caoyang, Xianbo Xiang, Philip A. Wilson, and Qin Zhang. "Guidance-error-based robust fuzzy adaptive control for bottom following of a flight-style AUV with saturated actuator dynamics." IEEE Transactions on Cybernetics 50, no. 5 (2019): 1887-1899. https://doi.org/10.1109/TCYB.2018.2890582
Christ, R. D. "RLW Sr,“Chapter 3-ROV components,”." The ROV Manual. Oxford: Butterworth-Heinemann (2007): 46-80. https://doi.org/10.1016/B978-075068148-3/50007-4
Anuar, Kaspul, and Agung Soegihin. "Aerodynamic Analysis of Unnamed Aerial Vehicle Serindit V-2 Using Computational Fluid Dynamics." Journal of Advanced Research in Fluid Mechanics and Thermal Sciences 93, no. 1 (2022): 83-93. https://doi.org/10.37934/arfmts.93.1.8393
ITTC, “Practical Guidelines for Ship CFD Applications,” in 27th International Conference Towing Tank, 2014, vol. 7.5–03 –02, pp. 31 August–5 September. Denmark.
Utama, I. Ketut Aria Pria, and I. K. Suastika. "Experimental and Numerical Investigation into the Effect of the Axe-Bow on the Drag Reduction of a Trimaran Configuration." International Journal of Technology 12, no. 3 (2021): 527-538. https://doi.org/10.14716/ijtech.v12i3.4659
Setiawan, Wira, Amalia Ika Wulandari, Aditya Miftahul Huda, and Syerly Klara. "Comparative Study of Ship Resistance and Fuel Consumption between Axe Bow and Moor Deep Ram Bow using CFD Method." CFD Letters 14, no. 8 (2022): 71-80. https://doi.org/10.37934/cfdl.14.8.7180
Ansys, C. "Ansys Cfx-Solver Modeling Guide. Canonsburg, PA, USA: ANSYS." (2020).
Menter, Florian R. "Two-equation eddy-viscosity turbulence models for engineering applications." AIAA journal 32, no. 8 (1994): 1598-1605. https://doi.org/10.2514/3.12149
Menter, Florian R., Martin Kuntz, and Robin Langtry. "Ten years of industrial experience with the SST turbulence model." Turbulence, heat and mass transfer 4, no. 1 (2003): 625-632.
Utama, I. Ketut Aria Pria, Wasis Dwi Aryawan, and Ahmad Nasirudin. "Numerical Investigation into the Pressure and Flow Velocity Distributions of a Slender-Body Catamaran Due to Viscous Interference Effects." International Journal of Technology 12, no. 1 (2021): 149-162. https://doi.org/10.14716/ijtech.v12i1.4269
Zeng, Fan-zhi, Jin-ping Li, Yu Wang, Mao Sun, and Chao Yan. "Parametric uncertainty quantification of SST turbulence model for a shock train and pseudo-shock phenomenon." Acta Astronautica 196 (2022): 290-302. https://doi.org/10.1016/j.actaastro.2022.05.002.
Elkafas, Ahmed G., Mohamed M. Elgohary, and Akram E. Zeid. "Numerical study on the hydrodynamic drag force of a container ship model." Alexandria Engineering Journal 58, no. 3 (2019): 849-859. https://doi.org/10.1016/j.aej.2019.07.004
ITTC, “ITTC – Recommended Procedures and Guidelines: Captive Model Test for Underwater Vehicles,” 2021.
Huang, Hai, Zexing Zhou, Hongwei Li, Hao Zhou, and Yang Xu. "The effects of the circulating water tunnel wall and support struts on hydrodynamic coefficients estimation for autonomous underwater vehicles." International Journal of Naval Architecture and Ocean Engineering 12 (2020): 1-10. https://doi.org/10.1016/j.ijnaoe.2019.04.008
Procedures, ITTC—Recommended. "Guidelines: Practical guidelines for ship CFD applications." ITTC Rep 7 (2014): 2-3.
Procedures, ITTC Recommended. "Uncertainty Analysis in CFD Verification and Validation, Methodology and Procedures." ITTC Recommended Procedures and Guidelines (2017): 7-5.