
Development of Surveillance Hovercraft via Arduino
DOI:
https://doi.org/10.37934/araset.33.3.16Keywords:
Air-cushion vehicle, hovercraft, insulation foam, bag skirtAbstract
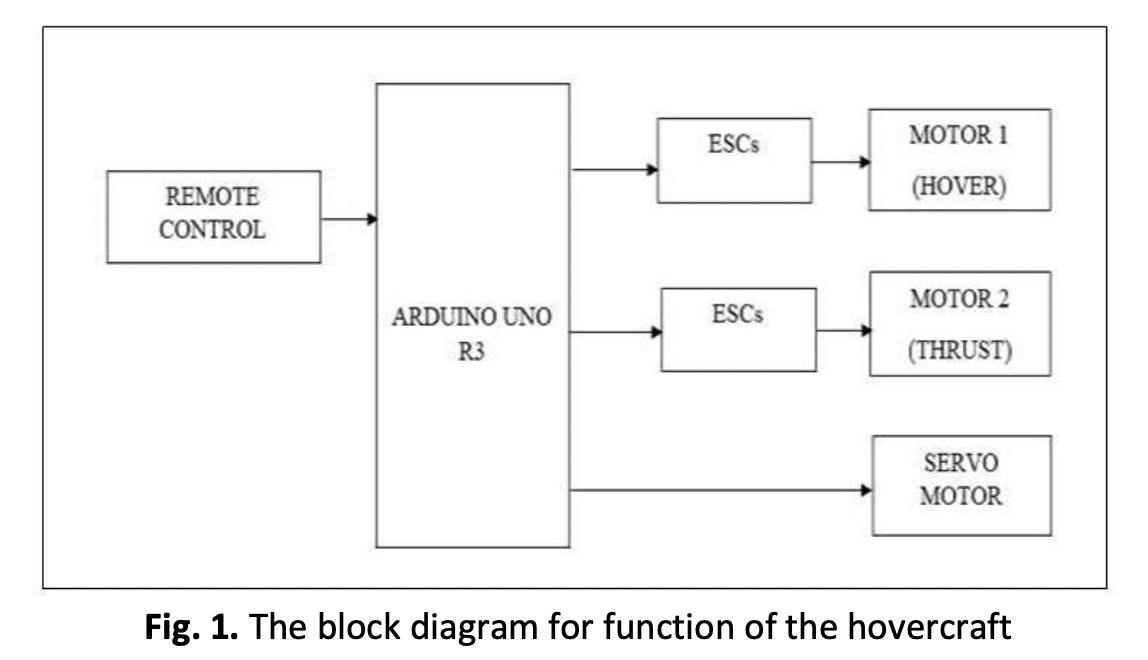
The current research focuses on the development of hovercraft via Arduino. The vehicle is designed with bag skirt structure in order to reduce friction for smooth operation. Nowadays, there are a lot of natural disaster occur in everywhere especially flood. However, hovercraft is a vehicle that need a driver to drive which can cause a danger to the rescuer. Based on this problem, a wireless hovercraft is needed to develop. This study explains a hovercraft which is able to control the movement of the hovercraft from the surface. The design of the hovercraft was successfully made by using AutoCAD software. Furthermore, the material of the body was made from the insulation foam while the microprocessor is Arduino UNO R3. There are two brushless DC motors and one servo motor that used for this hovercraft. The first brushless DC motor which is located below the hovercraft is used as a hover operation, while the second motor located behind it is used to ensure the hovercraft move forward. In addition, the performance of the hovercraft was successfully tested on the 3 different surfaces. As a result, the highest performance is on the cement while the lowest is on the grass.
Downloads
Downloads
Published
How to Cite
Issue
Section


























