Study of X-Pattern Crank-Activated 4-Bar Fast Return Mechanism for Flapping Actuation in Robo Drones
DOI:
https://doi.org/10.37934/arfmts.105.2.115128Keywords:
Bio-Inspired, fast return mechanism, flapping wing, micro aerial vehicle, four bar mechanism, crank slider mechanismAbstract
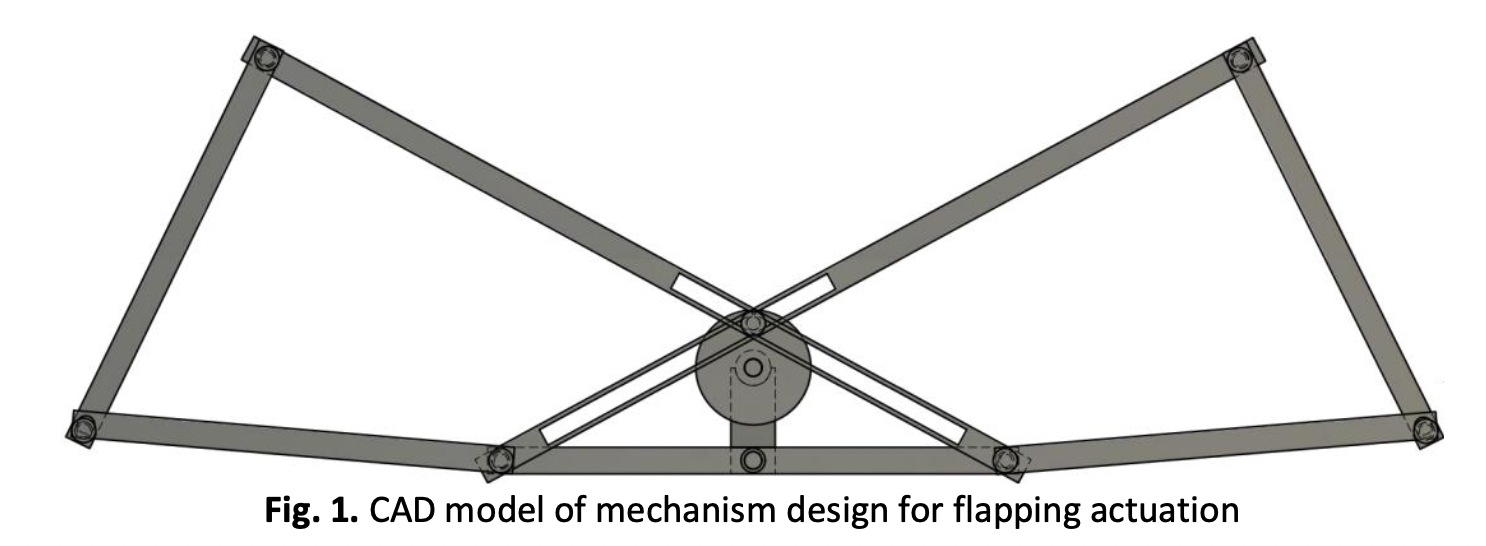
The study of insect-inspired flapping robo drones is exciting and ongoing, but creating realistic artificial flapping robots that can effectively mimic insect flight is difficult due to the transmission mechanism's need for lightweight and minimal connecting components. The objective of this work was to create a system of constructing a flapping superstructure with the fewest feasible links. This is one of the two strokes where the fast return mechanism turns circular energy into a variable angled flapping motion (obtained through simulation results). We have simulated the displacement modifications of the forward and return stroke variation. also conducted a kinematic study of the design processes differences, finding that it is significantly faster than the advance stroke. It was also seen that one of its levers lagged behind the others when flapping because of poor boundary conditions. Modelling the suggested motor-driven flapping actuation system helps verify its structural analysis and determine if it is appropriate for use in micro air vehicle applications.
Downloads
Downloads
Published
How to Cite
Issue
Section